恩迪数控的非标工程师团队,包含:机械设计、电气控制、软件编程、工艺制造、X射线等多领域知识人才的技术团队,可对客户的特殊需求,提供最优方案。
概述
航天器是针对太空环境设计的,众所周知,太空环境具有诸多的特殊性,例如大温差、高真空、强辐射等等。其中,在力学环境上,太空是一个失重环境,不太严格的讲,万有引力提供了飞行器做轨道运动所需的向心力。从外在现象上看,航天器犹如处于一个没有重力的环境,故此,也称作零重力环境。
然而,为确保航天任务的圆满成功,在航天器发射前需要进行大量的地面试验。由于地面环境与太空环境迥异,这就需要在地面模拟出太空的环境来。例如利用真空罐模拟出太空真空和高低温环境、利用光照设备模拟出太空的光辐射环境等等。那么,太空的力学环境是怎么在地面模拟的呢?
通常采用五种方式实现空间零重力环境的地面模拟:(1自由落体法、(2亚轨道抛物线飞行法、(3液浮法、(4气浮法、(5悬吊法。——本文主要针对气浮法进行说明:
气浮法
气浮法主要通过气悬浮的方法在光滑平台上通过气模支撑力将待试验产品平托起来,即气模支撑力与重力抵消来实现微重力模拟的一种方法,也是目前应用最广的方法之一。光滑平台主要由天然花岗岩制成,花岗岩具有抗压强度高、耐腐蚀等良好的物理特性,是建造大平台的理想材料。恩迪可为客户定制:特大型无缝拼接气浮式微重力模拟实验台,任意每平方米优于5µm。

气悬浮法主要是通过平面止推气浮轴承,将由气泵经配气箱分压后的气体,经平面止推气浮轴承喷出,利用气体压力,由气膜浮起试验目标飞行器,并通过改变节流孔的润滑气体压力,始终抵消自重和负载力的作用,使平面止推轴处在悬浮的状态,这时的摩擦力和粘附力几乎为零。所以轴及轴上的负载在轴向转动完全自由,使受试员可以在整个光滑平台上自由移动,气浮阻力能达到0.2N之内,精度很高。

采用气浮式实验系统的有加拿大SRMS和SSRMS地面实验系统、日本JEMRMS地面实验系统、美国Stanford大学建造的双臂自由飞行空间机器人系统、欧空局ERA(The European Robotic Arm)气浮试验系统等。国内,西北工业大学、华中科技大学、哈尔滨工业大学等高校及航天五院八院等都建立了平面气浮台的地面试验系统。哈尔滨工业大学为航天集团空间研究院研制的多套飞行器地面模拟系统,采用的均是气浮方法。


气浮式实验系统最大的优点是重力补偿比较彻底、建造周期短、费用低、易于实现等,同时技术成熟,且维护方便,可靠性、安全性及鲁棒性高,适应能力强,试验时间不受限制,可重复使用。

但是,其目前主要只能实现平面的微重力实验(二维的平动和一维的转动)和球面的三轴姿态控制实验。
总结
目前应用最广的是气浮法和悬吊法。其中,由于气浮技术的独特性,它不仅在零重力模拟上应用广泛,而且在高精度测量测试、自动化装配上也可以说大展神威。
例1:
这个是哈尔滨工业大学飞行器机电一体化中心研制完成在轨操控的模拟验证系统,两个模拟器都采用气悬浮技术,完成了交会对接、在轨模块更换、推进剂补加等空间操控技术的测试,通过这套系统,哈尔滨工业大学协助航天八院805所完成了国内首次全流程的在轨服务地面试验。

例2:
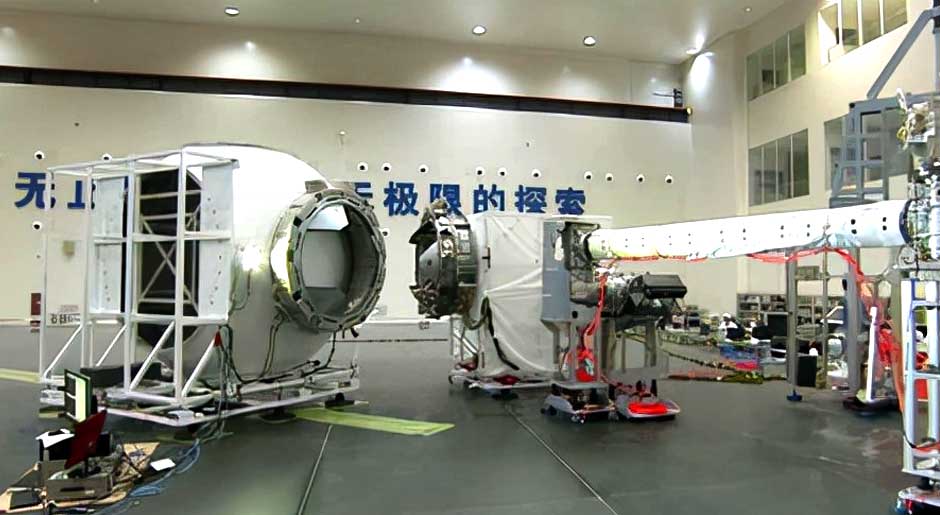
这个大块头也采用了气浮技术,不过它可不是模拟零重力环境,它是利用气浮技术提供的微摩擦特点,减小对重型设备进行运动控制的驱动力,从而实现精确的和柔性的运动控制,图中左右两侧的两个兄弟模拟的是重型装备的两个部段,它们兄弟俩最终是要合体的,而且要求高精度,这也是哈尔滨工业大学飞行器机电一体化中心研制的国内首次采用气浮技术实现重型装备的高精度柔性对接装配。

例3:
你别瞧这哥们个头大,它做的可全是灵巧的活,3″的空间矢量角度测量精度,那可绝对是世界标准,这可是认证过的。先说说这哥们是干嘛的吧。
小伙伴们都知道航天器上有惯导、相机等一堆敏感器吧,这些敏感器的安装可不是随意的,安装的位置和精度有着严格的要求。
然而,安装总是有误差的,这些误差影响到航天器的控制和航天器的对地观测等应用。这哥们就是要完成对敏感器安装误差的标校:每个敏感器的坐标系由一个立方镜代表,这个设备通过视觉辅助和准直光管准直测量敏感器三个正交面的法线方向,从而确定敏感器的空间坐标系。该设备主要结构也是天然花岗岩材料。

想更深入了解空间微低重力模拟可阅读论文:
[1]齐乃明,孙康,王耀兵等.航天器微低重力模拟及试验技术[J].宇航学报,2020,41(06):770-779.
[2]齐乃明,张文辉,高九州等.空间微重力环境地面模拟试验方法综述[J].航天控制,2011,29(03):95-100.DOI:10.16804/j.cnki.issn1006-3242.2011.03.019.