恩迪数控的非标工程师团队,包含:机械设计、电气控制、软件编程、工艺制造、X射线等多领域知识人才的技术团队,可对客户的特殊需求,提供最优方案。
在评估直线运动系统的精度时,人们通常关注驱动机构的定位精度和重复精度 。但影响直线系统精度的因素有很多,包括线性误差、角度误差和阿贝误差。在这三种误差中,阿贝误差可能是最难测量、量化和预防的,但却是机械加工、测量和高精度定位应用中导致不良结果的最主要原因。

阿贝误差是由运动系统中的角度误差及感兴趣点(刀具、负载等)与误差源(螺杆、导轨等)之间的偏移量共同造成的。
在考虑线性运动系统时,通常会采用笛卡尔坐标系。笛卡尔坐标系有三个线性维度:X 轴、Y 轴和 Z 轴。对于单轴线性平台,通常将 X 轴视为与运动方向一致的轴,而 Y 轴和 Z 轴则垂直于运动方向。除这三个线性维度之外,还有三个旋转维度:俯仰角、横滚角和偏航角。
角度误差(通常称为横滚、俯仰和偏航)是由于线性系统绕其三个轴旋转而产生的非预期运动。

如果一个系统沿 X 轴水平移动,如上图所示,俯仰角定义为绕 Y 轴旋转,偏航角定义为绕 Z 轴旋转,横滚角定义为绕 X 轴旋转。
横滚、俯仰和偏航误差通常是由导轨系统的不精确性造成的,但安装面和安装方法也可能是角度误差的来源。例如,加工精度不足的安装面、紧固不牢固的部件,甚至系统与其安装面之间热膨胀系数的差异,都可能导致角度误差大于线性导轨本身固有的误差。
这些误差通常并非由于平台未能移动规定的线性距离造成的,而是源于轴承、安装和机械结构缺陷导致的微小固有角度误差(俯仰角、横滚角、偏航角)。这些微小的倾斜会随着距离的增加而被放大,从而在实际目标点产生显著的位置误差——这种现象被称为阿贝误差。
理解和计算阿贝误差对于设计真正精密的运动系统至关重要。阿贝误差尤其成问题,因为会放大大多数情况下非常小的角度误差,并且随着与引起误差的分量(称为阿贝偏移)的距离增加,误差幅度也会增加。

阿贝误差(Abbe error) ,以恩斯特·阿贝的名字命名,也称为正弦误差 ,描述角度误差随距离的放大倍数。例如,当测量距离为 1 米、角度为 90 度的点时,1 度的角度误差对应于超过 1.745 厘米的位置误差,相当于 1.745% 的距离测量误差。
对于悬臂载荷,载荷距离角度误差的来源(通常是导轨或安装面上的某一点)越远,阿贝误差就越大。而对于多轴结构(龙门架系统,笛卡尔坐标系,XY工作台),阿贝误差则更为复杂,因为每个轴上的角度误差都会叠加。
与其他类型的多轴系统(如笛卡尔机器人)相比, XY 工作台不太容易受到阿贝误差的影响,这主要是因为它们最大限度地减少悬臂行程,并且通常在负载位于 Y 轴滑架中心的情况下运行。
在机械设计中,某些零件对角度误差特别敏感。例如, 车床主轴轴线与刀具沿床身运动方向的平行度哪怕只有轻微偏差,都可能导致零件出现较大的锥度(即非圆柱形零件)。
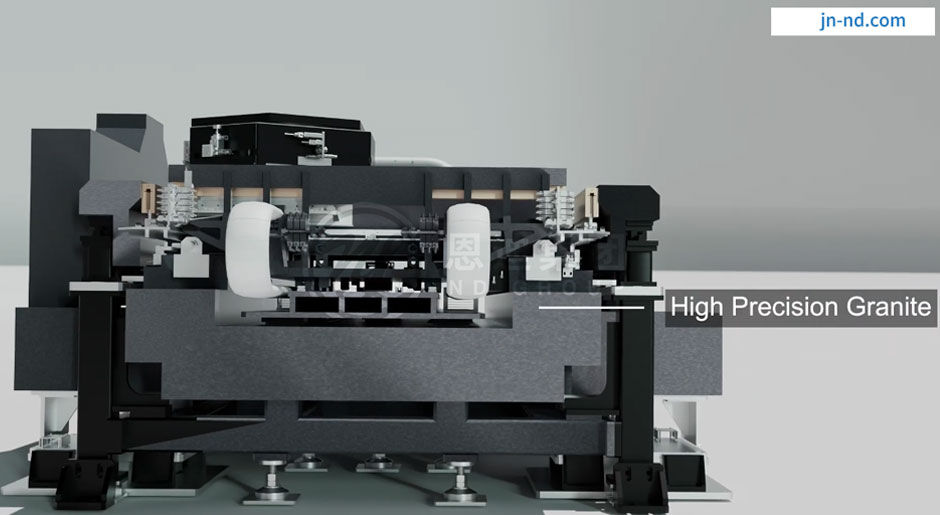
最大限度减少阿贝误差的最佳方法是使用高精度导轨,确保安装面经过充分加工,以免给系统引入额外的误差。将负载尽可能靠近系统中心,从而减小阿贝偏移,也能最大限度减少阿贝误差。
阿贝误差最精确的测量方法是使用激光干涉仪或其他完全独立于系统的光学设备。但激光干涉仪对于大多数应用场景来说并不实用,因此在许多需要考虑阿贝误差的应用中,通常使用线性编码器。在这种情况下,将编码器读头安装在目标点(例如刀具或负载)上,可以获得最精确的阿贝误差测量结果。

在理想状态下,工作台应严格沿其预定轴线移动,且在其他维度上不产生任何位移。然而实际操作中,这六个维度均存在误差。X轴方向的误差称为"精度误差",Y轴与Z轴方向的误差则分别称为水平跳动和垂直跳动。
这三类误差均以线性距离定义,其数值在任意测量点处保持恒定。至于围绕角轴旋转产生的误差,其线性数值会随滑台到测量点的距离增加而增大。
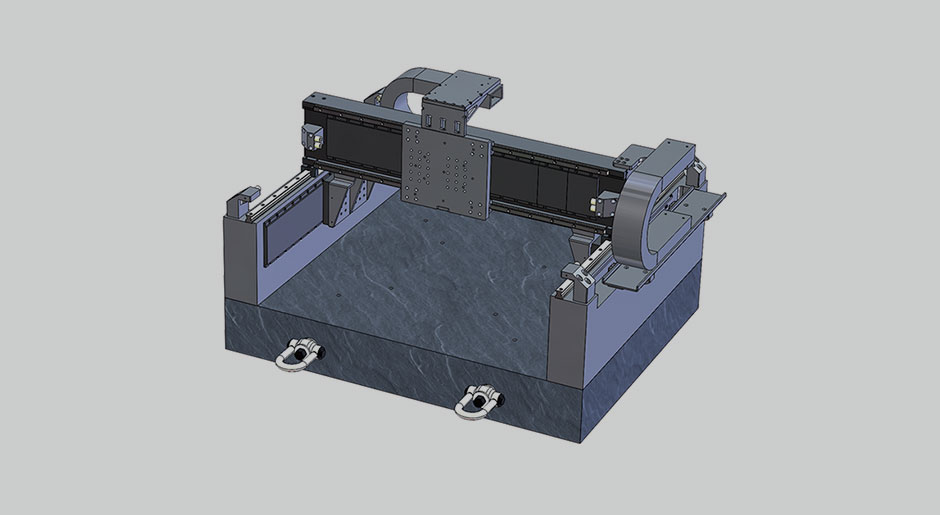
为举例说明实际应用,考虑一个 LRQ XZ 系统, 其中两个线性平台通过 AB164 支架相互垂直安装。下平台沿 x 轴移动,上平台沿 z 轴移动。该装置如下图所示:

垂直平台(z 轴)行程为 150 毫米,水平平台(x 轴)行程为 300 毫米。300 毫米 LRQ 线性平台(X轴)具有以下角度误差规格 :
3、Yaw: 0.03° 偏航角:0.03°(绕Z轴旋转)
对于此 XZ 应用,认为俯仰角误差(绕Y轴旋转)和横滚角误差(绕X轴旋转)最为重要,因为俯仰轴和横滚轴与目标点之间可能存在较大的偏移。
在此配置中,偏航(绕Z轴旋转)轴偏移较小且恒定,因此偏航阿贝误差小于俯仰角误差或横滚阿贝误差,但仍然值得计算。如果需要,可以使用定制支架来减小偏航轴偏移,使 Z 轴平台更靠近 X 轴平台顶部的中心。
俯仰误差(绕Y轴旋转)会导致垂直 LRQ 平台顶部沿 x 轴方向产生微小位移。为量化此误差的影响,需要知道每个平台顶部的实际位置。我们关注的焦点是 z 轴平台顶部,当 z 轴位于顶部时,偏移量最大,情况最为严重。偏移量取决于 z 轴的行程位置。
参考三维模型和图纸, 确定 x 轴平台顶部中心与 z 轴平台顶部中心之间的距离为 212 毫米。该重要距离如下图所示:

对于许多应用而言,126 μm 的精度至关重要。采用直接式线性编码器的 LRQ 线性平台的线性精度可达到 10 μm。由此产生的阿贝误差比这些直接式编码器平台的行程精度大一个数量级。为最大限度地降低阿贝误差的影响,必须尽可能减小偏移距离 h。
δz ,螺距 = b·tanφ = 82 mm × tan(0.034°) = 0.049 mm = 49 μm
δ y1,滚动 = h·tanα = 212 mm × tan(0.015°) = 0.056 mm = 56 μm
下图显示沿 y 轴方向由 x 轴平台顶部辊旋转引起的角度误差,水平线性平台绕滚轴旋转引起的阿贝误差 δ y1 。滚转角误差用 α 表示。

下图显示沿 y 轴的角度误差,该误差是由 x 轴平台顶部偏航旋转引起的。

3、在线性平台上添加第二个被动滑架。该附加滑架可以提高角刚度并减少俯仰误差;

对于多轴应用,可以考虑采用龙门架结构。两个平行的 X 轴电机同步驱动,可以提高刚度,同时减少横滚和偏航误差。

重复性、精度和跳动等指标能够很好地描述平台顶部的误差,但当关注的点远离运动轨迹时,务必将角度误差源考虑在内,以便估算实际应用中的不精度。