恩迪数控的非标工程师团队,包含:机械设计、电气控制、软件编程、工艺制造、X射线等多领域知识人才的技术团队,可对客户的特殊需求,提供最优方案。
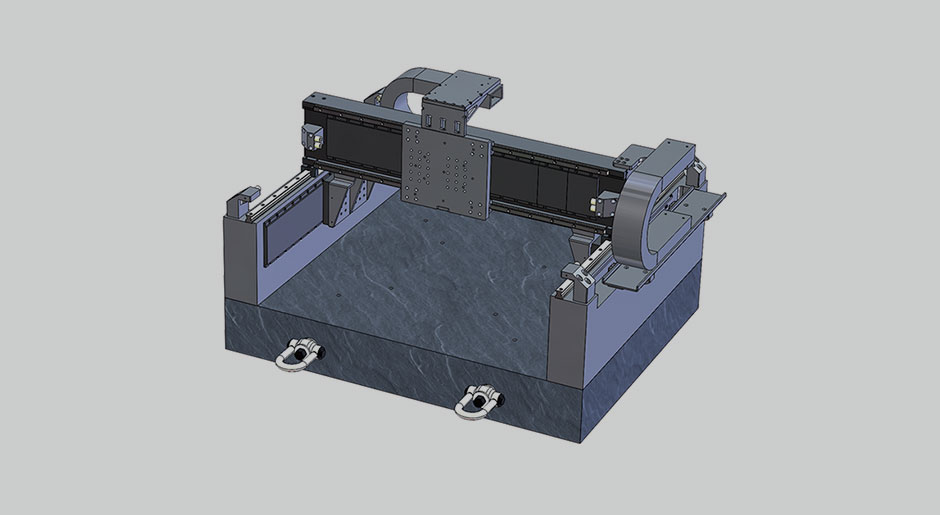
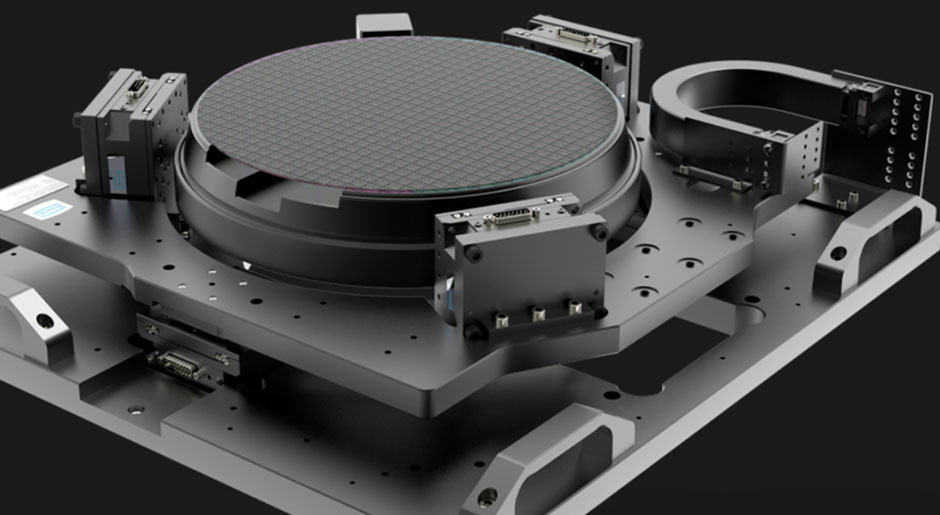
在晶圆检测、激光微加工、3D测量、数字打印等领域,对平面运动要求会比较高:像大跨度,大负载,运动平滑,轴间耦合小等。因此对运动控制一般都要求能快速响应和整定、误差小、精度高。
在这些场合,传统的十字架式的XY平台很难满足要求,因此必须使用到龙门结构,如图所示,一个龙门需要由两个电机和机械结构组成,X1 axis 和X2 axis共同完成X轴方向的运动。

龙门结构示意图
01
单反馈-单电机
只在其中一边有电机提供动力,另一边则由导轨支撑,通过机械应力来运动。
优势:比较经济。
劣势:控制性能差,容易对机械造成损伤。

龙门结构-单反馈-单电机
02
单反馈-多电机
相当于把两个电机并联,一组信号同时控制两个电机。
优势:推力可以耦合至龙门轴中心,减少机械刚性较弱的影响。
劣势:对机械安装和电机一致性要求非常高,很容易因此导致控制问题差。反馈的中心和龙门轴中心并不共线,导致控制性能不足,限制最终控制精度级别。

龙门结构-单反馈-多电机
03
主从控制
通过控制器来协同两个驱动器同步运动。
优势:在低速场合效果比较好,工程实施性价比较高。
劣势:在高速运动场合同步性能会变差,轴间耦合影响较大,不适合高动态龙门控制。

图:龙门结构-主从控制
04
交叉解耦算法
在驱动器层面进行龙门的交叉解耦控制,进行龙门双轴电机、耦合后反馈的自动控制,有龙门轴控制刚性的独立PID参数。甚至可以进行偏摆角的动态控制。
优势:可以更大程度提高控制性能。可以解决龙门机械耦合的问题。控制器层面开发简单,易操作。
劣势:需要较大的运算量,对控制器和驱动器要求较高。

龙门结构-交叉解耦
龙门算法是交叉解耦算法中的一种。
把龙门看作是多输入多输出(MIMO)系统,前进方向轴和扭摆轴两个控制对象来控制而不是两个电机,这样可以实现耦合后两轴单独控制,减少机械耦合的影响。

龙门模式-交叉解耦
接线
选好龙门对应的轴,接上电机,编码器线。确保两路编码器的计数方向一致。

图:龙门调试思维导图
调试
龙门算法开启后,龙门的调试与单轴调试方法大致相同,只是AXIS1代表龙门垂直方向GANTRY AXIS轴,(虽然两个电机在运动,但系统把它看作一个轴)AXIS2代表YAW AXIS扭摆轴 。(扭摆也是通过两个电机运动来实现,但系统把它看作一个轴)

图:非龙门模式与龙门模式对比
电流设置
GANTRY AXIS负责出力,带动负载运动,需要设置较大的电流;YAW AXIS负责调整姿态,只需设置较小的电流。
位置反馈
龙门模式的轴位置反馈与实际电机位置并不相同,由于机械制造偏差的存在,龙门与导轨之间不一定完全垂直,FPOS(axis1)=0并不一定是最理想的位置。相反,有一定的倾斜反而有利于减少摩擦。因此在龙门调试时有必要对最佳倾斜角进行测量。
电机使能
龙门需要两个电机共同运动来实现,当只使能某一个轴时,实际上两个电机都会上使能;掉使能某一个轴,两个电机都会掉使能。
横梁轴负载较大
需要在负载在不同位置时多做几组动态参数分析,以保证在各种情况下系统都能保持高运动性能。
01
龙门模式PEG
Position Event Generator(PEG)位置事件触发器能在精确的反馈位置触发脉冲(PEG Pulse),可用于触发外部设备,如相机、激光器等。
通过将实际编码器位置与一组预定义值进行比较,在驱动器硬件底层生成 PEG Pulse。由于龙门模式下两个轴的计算位置与电机反馈的位置是不一样的,因此在使用PEG功能时也需要经过换算,才能正确触发PEG信号。
02
龙门模式动态补偿
龙门的两个轴都可以进行补偿,龙门轴GANTRY AXIS的补偿用于提高精度。扭摆轴YAW AXIS的补偿在刚性龙门中可以减少摩擦和电流过充,提高动态性能。在柔性龙门中用于提高精度,同时提高了龙门轴的YAW机械指标。