恩迪数控的非标工程师团队,包含:机械设计、电气控制、软件编程、工艺制造、X射线等多领域知识人才的技术团队,可对客户的特殊需求,提供最优方案。
运动设备(如位移台)的功能是在理想轨迹上产生所需的运动。此外,该设备必须能够可靠且可重复地到达指定的目标位置。诸如运动部件之间的摩擦、导轨的质量或由移动负载引起的弯曲等因素,往往会使运动偏离理想轨迹,或导致实际位置与目标位置之间产生差异。本节的主题将详细探讨影响这些设备运动的各种因素,以及如何表征它们的定位精度与准确度。
定位基础(Positioning Basics)
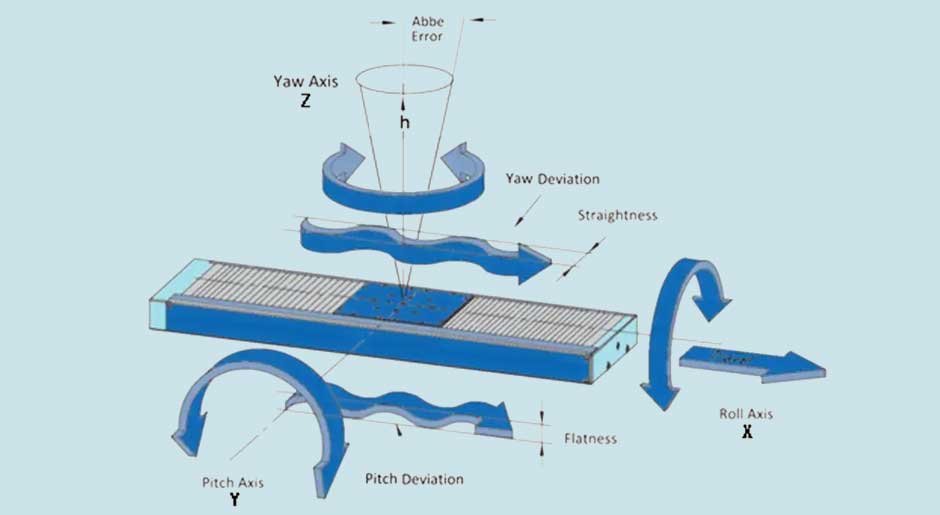
任何定位位移台都被认为具有六个自由度:沿x、y和z轴的三个线性平移自由度,以及绕这三个轴的三个旋转自由度。位移台的目的是沿着理想轨迹产生运动,这就需要将运动限制在特定的自由度内。在非约束方向上的任何运动都会导致其偏离理想轨迹和/或位置。例如,线性平移台的功能是将运动限制在一条理想的直线上。线性位移台的跳动误差(Runout)是离轴误差的线性(而非角度)部分,表示其偏离预期理想直线运动的程度。跳动误差由两个正交分量组成,即平直度(flatness)和直线度(straightness)。图1显示了一个理想直线运动被限制在x轴上的线性位移台。在这种情况下,平直度偏差是沿z轴的位移,而直线度偏差是沿y轴的位移。同样,线性位移台的角度偏摆(或倾斜)是移动功能点(即进行测量或加工的点)的旋转。它具有三个正交分量,通常被称为俯仰(pitch)、横滚(roll)和偏航(yaw)(见图1),并且可以是这三个分量的复杂组合。此外,如果将多个位移台连接在一起构建多轴系统,则可能会发生交叉耦合(cross-coupling),这意味着一个轴的变化可能会导致另一个轴发生不必要的改变。
图1. 线性位移台的平直度和直线度跳动误差(左上)。线性位移台的横滚、俯仰和偏航角度偏摆(左下)。旋转台的离轴偏差(右)。
对于旋转位移台,偏心(eccentricity)是指当位移台旋转一圈时,旋转中心偏离其平均位置的径向(垂直于旋转轴)偏差(见图1)。它也被称为径向跳动(radial runout)。拥有完美轴承且完美居中的位移台是没有偏心的。旋转台的晃动(Wobble)是指在旋转一圈的过程中,旋转轴相对于理想轴的倾斜。这种现象最容易表现为旋转台面周而复始的周期性倾斜。与偏心一样,这通常也是由于轴承不完美所致。
除了沿理想轨迹运行外,位移台还应能可靠地到达并保持在指定的目标位置。反向误差(Reversal error)是指当从相反方向接近给定目标位置时,所到达的实际位置之间的距离(见图2)。该值是背隙(backlash)和迟滞(hysteresis)的综合结果。背隙是驱动系统中相互作用的机械部件之间发生相对运动,但未产生输出运动的结果。导致背隙的因素包括机械部件(如齿轮的轮齿)之间的间隙以及机械变形。并非所有系统都存在背隙,但只要存在,它主要影响的是双向重复定位精度(见下文)。由于背隙具有可重复的特性,运动控制器通常可以对其进行补偿。迟滞则是反向误差中的一个组成部分,它取决于系统的近期历史状态。它是各种组件中弹力的结果,并在作用于系统的力反向时表现出来。迟滞会同时影响双向重复定位精度和准确度(见下文)。与背隙不同,迟滞存在于所有机械系统中,尽管其数值可能非常小。反向误差关系到位移台到达目标位置的能力,而位置稳定性(position stability)则是指在指定时间间隔内,将位置保持在指定位置范围内的能力。它是漂移(drift)和振动(vibrations)的总和。漂移是偏离稳定位置的缓慢偏差,主要受润滑剂的迁移和温度变化的影响。振动则是环境(例如气流噪声、风扇)和电子设备(例如电机驱动器)引起的小振幅、快速的交变运动。

图2. 线性位移台位置偏差图解,即功能点达到的实际(或测量)位置减去目标位置。
除了位置之外,位置变化率(即速度)也是运动系统中的一个重要因素。最大速度规格通常是在位移台的额定法向负载能力下给出的(见下文)。在较低负载或使用更大的电机驱动器时,可能实现更高的速度。最小速度则高度依赖于运动系统的速度稳定性。速度稳定性是衡量运动系统在规定限度内保持恒定速度能力的指标,通常以期望速度的百分比来表示。加速度是速度的变化率,通常为了在规定时间内达到最大速度而进行设定。摩擦力在位移台的速度、速度稳定性和加速度中起着重要作用。摩擦力被定义为接触表面之间阻碍运动的阻力。导致摩擦的因素可能包括空气阻力、滑动摩擦、润滑耗尽、系统磨损或润滑剂粘度。静摩擦(Stiction)是使静止物体产生运动所必须克服的摩擦力。由于静摩擦通常大于动摩擦,因此施加来使其产生初始运动的力,要大于保持物体运动所需的力。结果,当最初施加力时,物体将以“跳跃”的方式开始移动,从而导致位置或速度出现过冲(overshoot)。
负载能力是在满足位移台规格的情况下,可以沿特定方向施加到设备上的最大允许力。该最大力包括静态力(质量乘以重力)和动态力(质量乘以加速度)。动态力必须包括作用在位移台上的任何外力(如振动)。位移台能施加给物体的加速度大小,受限于其在不超出负载能力的前提下所能产生的加速力。具体而言,居中法向负载能力(centered normal load capacity)是可以施加到线性位移台上的最大负载(重心位于滑块上,且方向垂直于运动轴)(见图3)。对于旋转台,它是沿旋转轴向的最大负载。横向负载能力(Transverse load capacity),也称侧向负载能力,是垂直于运动轴且沿着滑块表面施加的最大负载。这通常小于法向负载能力。轴向负载能力(Axial load capacity)是沿传动系统方向的最大负载。对于垂直安装的线性位移台,规定的垂直负载能力通常受限于轴向负载能力。当负载未居中时,位移台的最大负载能力会随之降低。惯量(Inertia)是负载对速度变化阻力的量度。惯量越大,加速或减速负载所需的力就越大。如果可用的驱动力有限,则必须将允许的加减速度调整至可接受的范围内。转动惯量是各质量微元与其到旋转轴距离平方的乘积。为旋转台规定的最大惯量是基于系统可用扭矩计算得出的值。

图3:位移台的不同负载能力。
运动控制技术指标(Motion Control Specifications)
在为特定应用选择合适的定位设备时,通常会根据产品规格(特别是重复定位精度和准确度)对其进行评估。重复定位精度(Repeatability)经常与准确度(Accuracy,或称绝对精度)混淆,但如图4所示,一个系统可能具有很高的重复性,但在准确度方面表现欠佳。准确度是衡量给定排量与公认标准相符程度的指标。例如,跳动误差(runout)也与直线度精度(straight-line accuracy)直接相关。运动系统的准确度也会受到测试设置、环境条件以及测量位移程序的极大影响。借助大多数现代控制器,只需在控制器中输入补偿系数即可轻松实现线性误差的补偿。因此,针对特定位移台给出的参数往往是“补偿后的准确度”。

图4:准确度(Accuracy)与重复定位精度(Repeatability)之间的差异图解。
重复定位精度是衡量定位系统连续定位能力的指标。它可以是单向的(始终从同一个方向接近目标位置)或双向的(从任意方向接近目标位置)。在许多应用中,运动系统的重复定位精度比其准确度更为重要。因为系统误差可以被计算并补偿掉,但重复定位精度是在完成所有补偿后,系统所能达到的最终物理极限。重复定位精度的核心概念是衡量系统在从相同或不同方向进行多次尝试时,稳定到达给定指令位置的能力(见图5)。反向误差和位置稳定性从根本上决定了系统的重复定位精度。在许多不同的工业领域中,重复定位精度对确保产品质量至关重要。如果在制造环境中没有良好的重复定位精度,就无法建立可靠的工艺流程来确保产品始终以统一的方式制造并始终符合同样的规格。

图5:产生位置误差分布的测量结果定义了运动控制系统的重复定位精度。
分辨率(Resolution)是运动系统可被指令移动和/或检测到的最小增量。但系统未必能够始终如一地执行等于分辨率的增量移动。最小增量运动(MIM, Minimum Incremental Motion)才是设备能够持续、可靠地执行的最小实际运动增量。影响这一实际运动输出的因素包括摩擦、负载、外力、系统动力学、控制器性能、振动和系统惯量。MIM 不应与分辨率相混淆,后者通常仅仅基于控制器的最小显示数值或编码器的最小计数增量。分辨率的数值可能远小于最小的实际运动输出——这是一个十分关键的区别,却往往没有被人们充分理解。因此,MIM有时也被称作“实际分辨率”(practical resolution)。